Underwater Survey & Sonar Services
AUS-ROV specialises in advanced underwater spatial data acquisition, delivering precise surveys and inspections across a wide range of industries and subsea environments.
Utilising single-beam and multi-beam sonar, subsea laser scanning, and 3D photogrammetry, we produce accurate, high-resolution datasets for digital-twin modelling, hydrographic bathymetric surveys, acoustic image mosaicking, and geographic information systems (GIS).
Our teams conduct detailed subsea surveys within flooded constructed infrastructure — including pipelines, tunnels, and marine structures — as well as external benthic habitat environments, supporting engineering, environmental, and forensic applications.
AUS-ROV's underwater inspection and survey methodologies are trusted by asset owners, engineers, and environmental consultants who require spatially accurate, analysis-ready data from challenging underwater environments.





What We Deliver
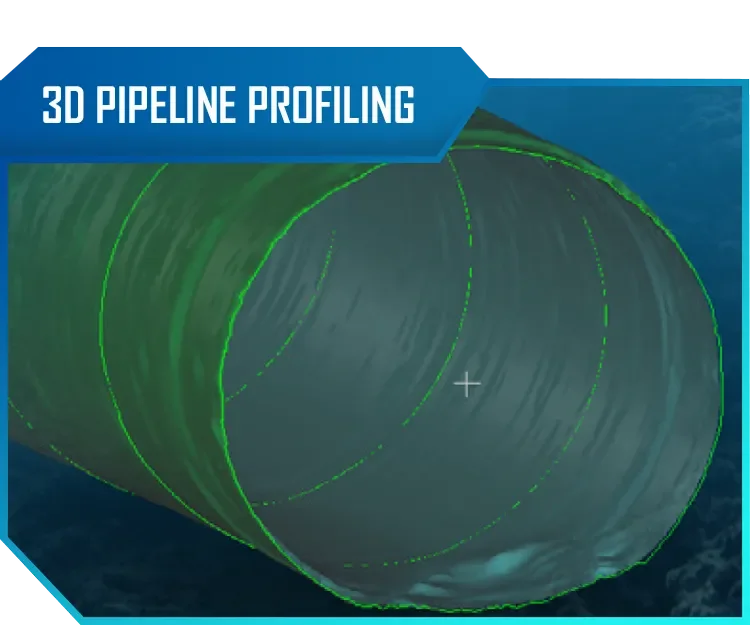
3D Pipeline & Tunnel Profiling — mechanical rotating profiling sonar producing dimensionally accurate internal models, effective in zero-visibility conditions
Multibeam Bathymetric Surveys — Norbit iWBMS georeferenced point cloud data for seabed mapping, hazard charting, and engineering assessment
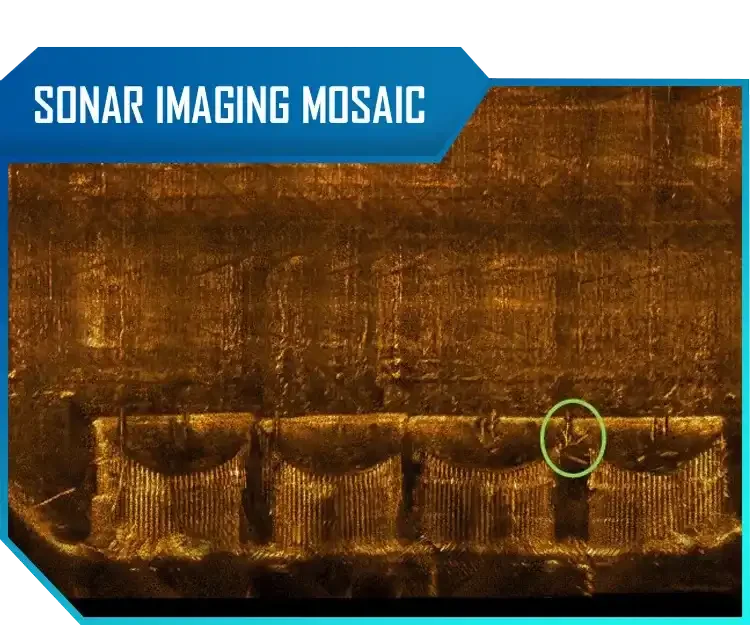
Acoustic Image Mosaicking — GPS-independent semi-automatic sonar mosaicking, georeferenced and GIS-ready
Underwater Laser Scanning — 2G Robotics ULS-200 & Voyis Insight Nano for engineering-grade subsea point cloud capture
3D Photogrammetry — high-resolution photogrammetric modelling for BIM and CAD deliverables
GIS & Spatial Analysis — vectorised datasets, change detection monitoring, and multi-platform interoperable reporting

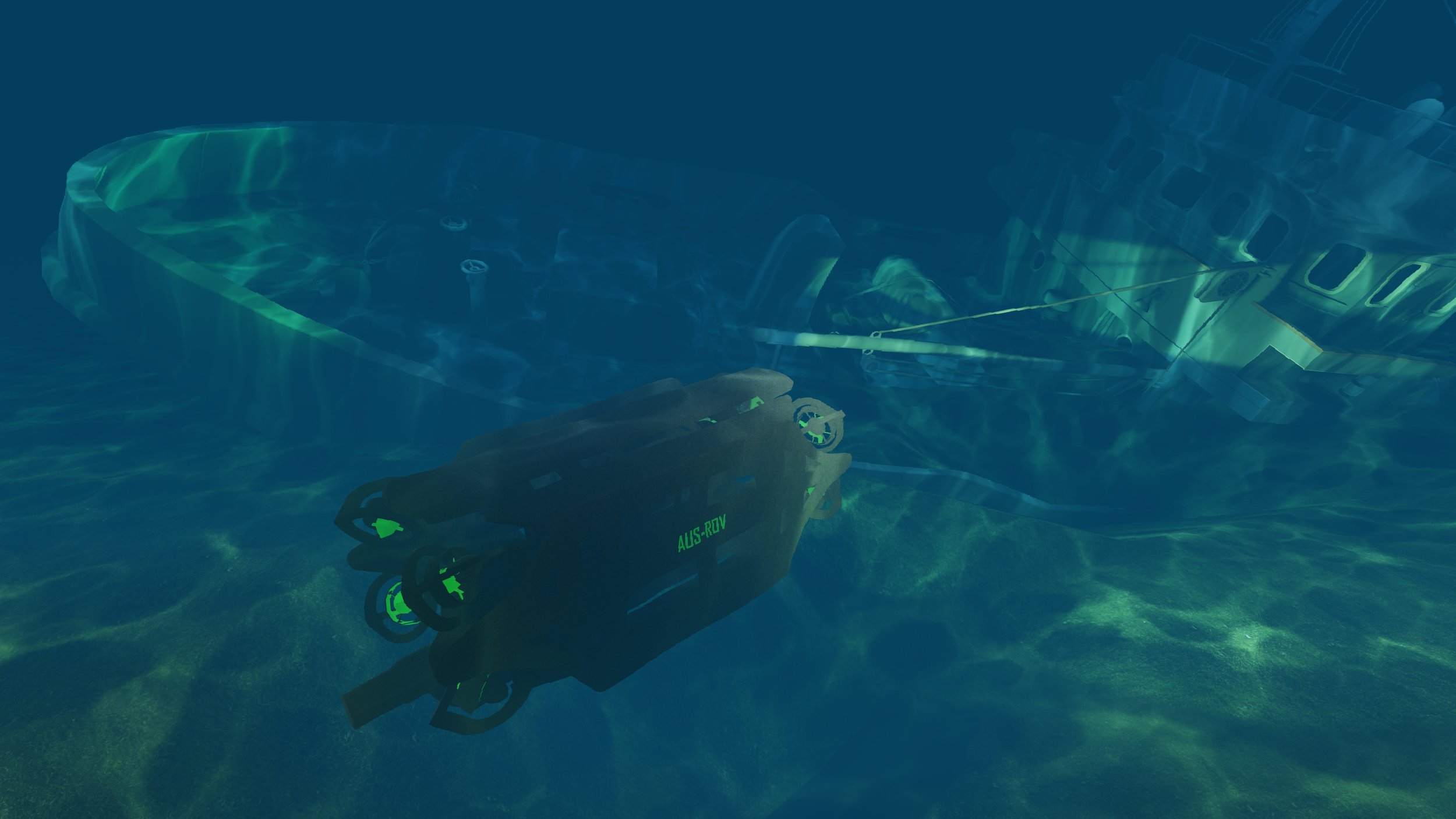
AUS-ROV deploys both multi-beam and single-beam sonar systems to capture high-resolution spatial data across a wide range of underwater structures and environments. Multi-beam sonar acquires dense, georeferenced bathymetric datasets to produce accurate 3D underwater topographic models, while single-beam profiling sonar is used to profile the internal and external geometry of structures for replication as precise 3D point cloud models. These complementary technologies enable AUS-ROV to deliver across a broad application spectrum — from locating shipwrecks and submerged reefs, charting navigation hazards, and mapping seabed environments, to detailed structural assessment of pipelines, tunnels, and marine infrastructure.
AUS-ROV's survey team comprises hydrographic surveyors, GIS specialists, and subsea technicians operating at the intersection of field acquisition and technical data processing. Our services span seabed mapping, pipeline route surveys, bathymetric surveys, structural profiling, and marine construction support — delivered across projects of varying complexity, depth, and environmental challenge. Every dataset we produce is processed to engineering-grade accuracy and structured for direct integration into GIS, BIM, and CAD workflows, minimising downstream handling for our clients.
Sonar Survey | Mosaicking, Bathymetry & Structural Profiling
Sonar is frequently the only viable sensor in challenging subsea environments where cameras are defeated by turbidity and laser scanners are limited by range or geometry. For confined infrastructure, zero-visibility conditions, and complex seabed terrain, acoustic data acquisition delivers where all other technologies fall short.

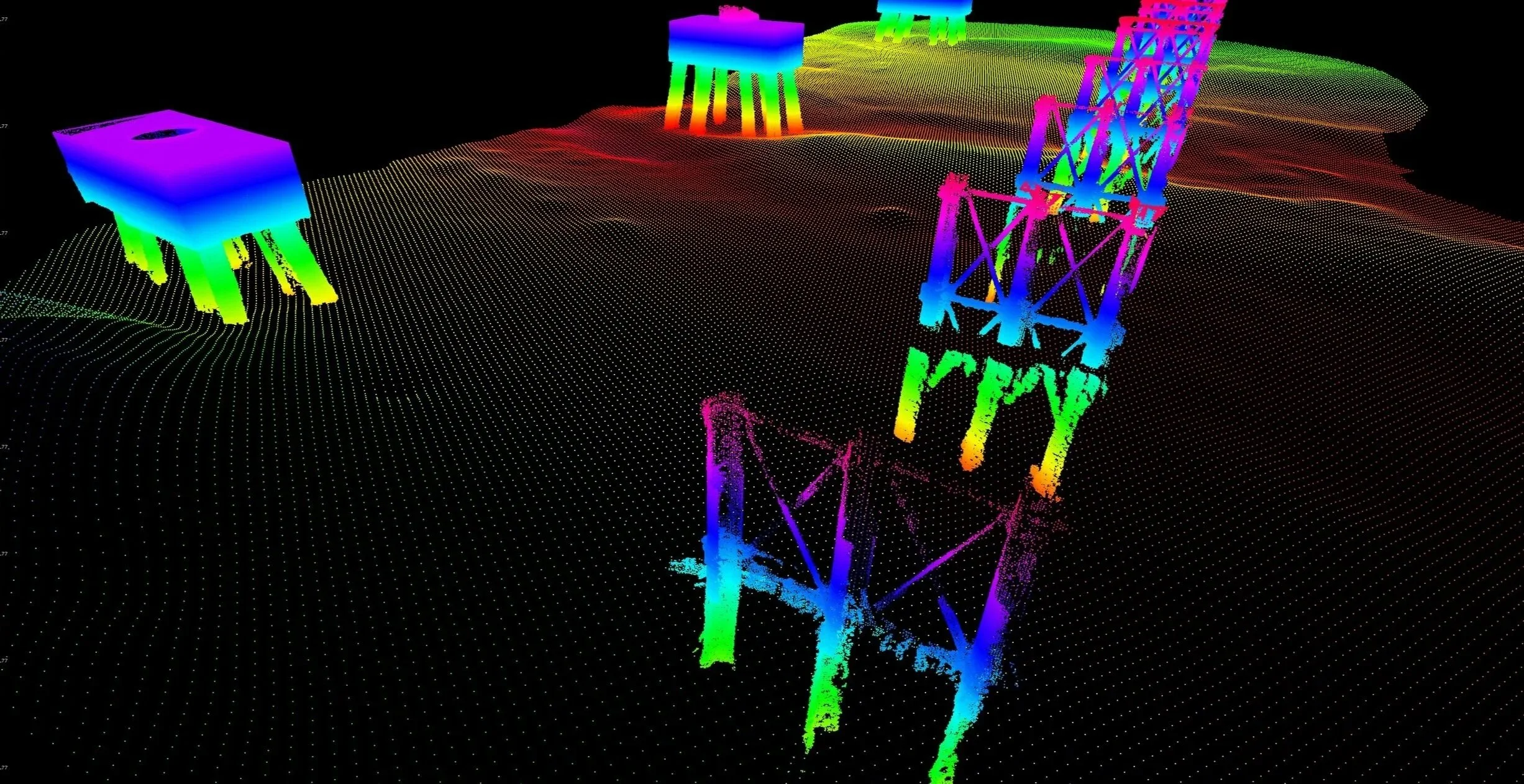
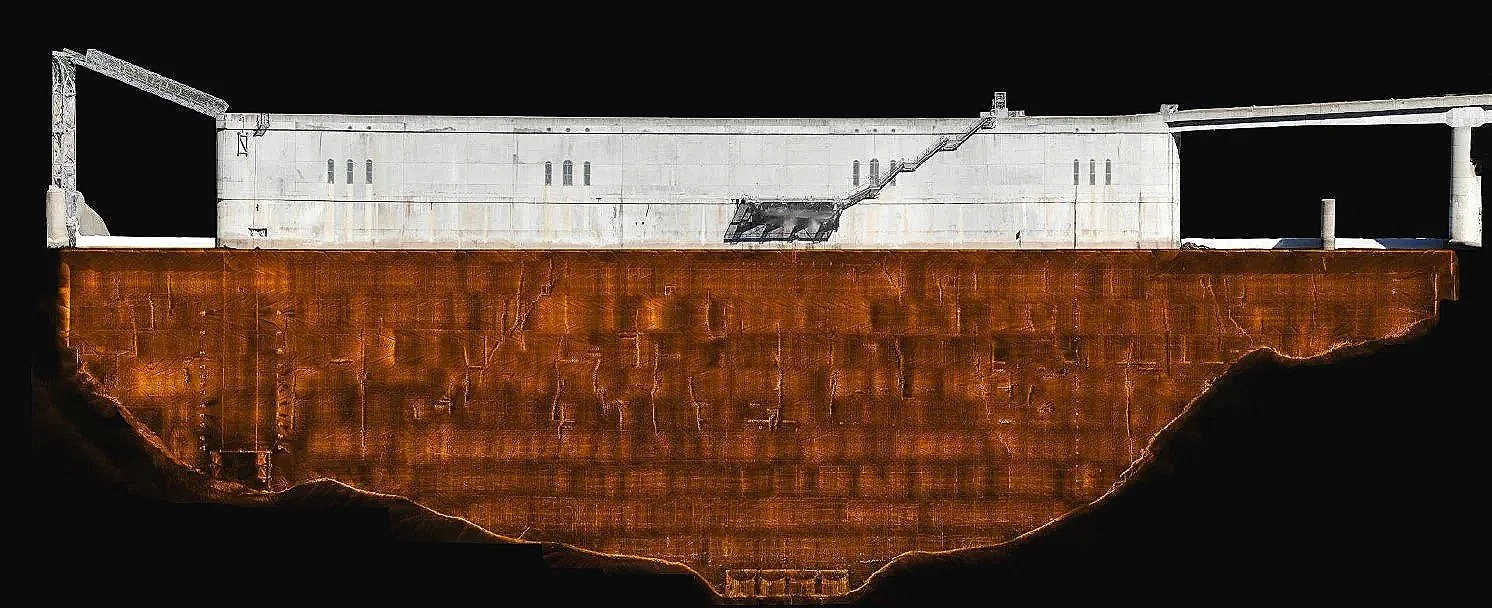
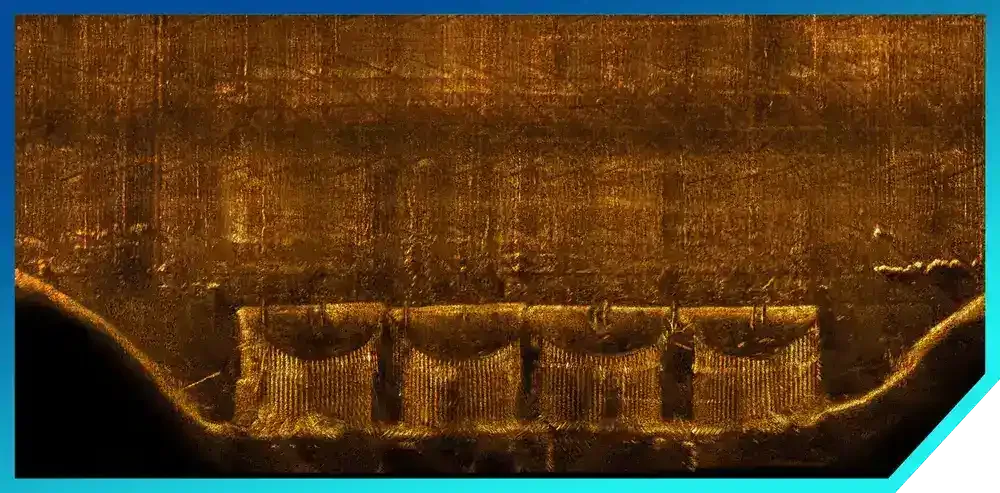
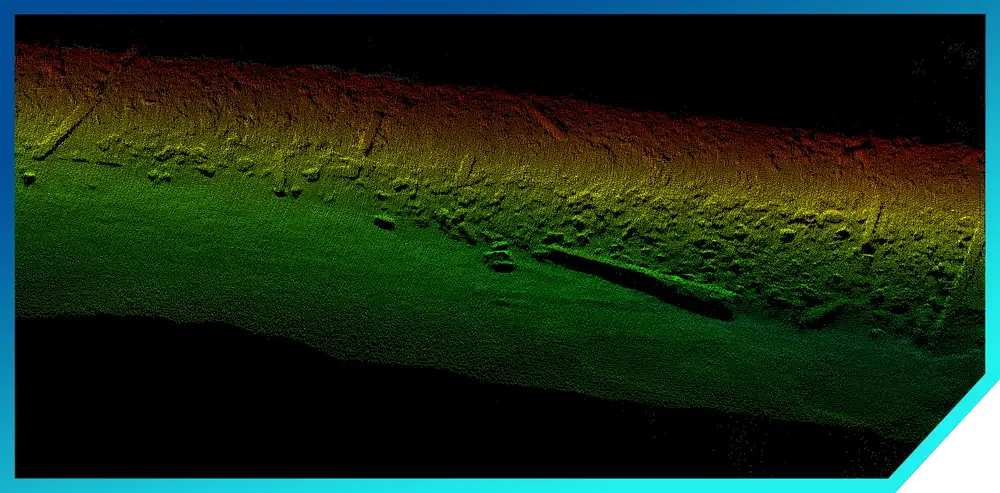
This composite image illustrates this capability directly — an interlocking steel pile wall surveyed using a hybrid approach, with above-water photogrammetry capturing the exposed structure in high-resolution optical detail, and 2D multibeam imaging sonar mapping the submerged piling faces below the waterline. The result is a seamless above-and-below surface dataset that provides engineers and asset managers with complete structural visibility across the full extent of the asset — from the waterline to the seabed.
2D multi-beam imaging sonar can be deployed on remotely operated vehicles (ROVs) or autonomous underwater vehicles (AUVs), enabling close-range image mapping of specific structural surfaces and areas beyond the reach of surface-mounted systems. Where GPS positioning of the ROV is limited or unavailable, AUS-ROV's semi-automatic mosaicking methodology resolves this challenge — extracting raw sonar captures as individual frames, precisely aligning them within GIS software, and applying stitching and blending algorithms to produce a single, seamless, georeferenced mosaic anchored to existing engineering plans or orthophotos.
The resulting datasets are far more than static images. Multiple mosaics can be stacked across survey campaigns to detect change and monitor long-term asset condition, while vectorised feature mapping enhances interoperability across GIS, engineering, and asset management platforms — making the data immediately actionable across disciplines.
-
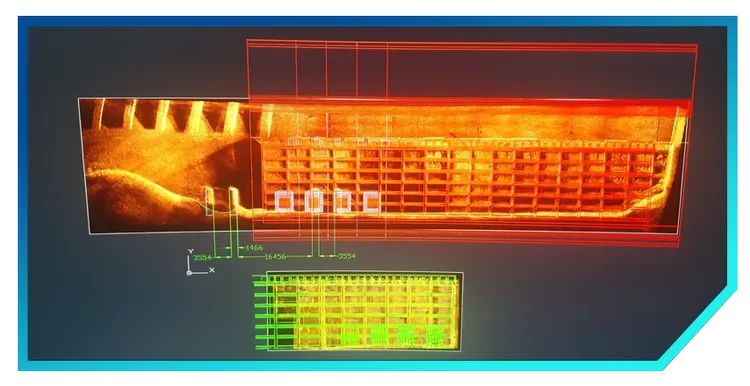
TWO-DIMENSIONAL SEMIAUTOMATIC MOSAICKING WITHOUT GPS POSITIONING DATA
AUS-ROV engineers have developed a proprietary semi-automatic sonar image mosaicking methodology that represents a significant advancement in subsea acoustic imaging — most notably in its elimination of the dependency on navigational positioning data that constrains conventional mosaicking approaches. Raw sonar imagery is systematically extracted as discrete frames and subjected to precision alignment within a GIS environment, where a purpose-configured stitching and blending algorithm processes the full image sequence into a single, seamless, and radiometrically consistent mosaic. The resulting composite is then georeferenced against existing engineering plans or orthophotographic base layers, anchoring the acoustic data within an accurate and queryable spatial framework. This methodology delivers a level of detail and spatial continuity that allows engineers and asset managers to confidently identify, classify, and map subsea features — including structural anomalies, sediment accumulation, scour, and man-made objects — with a degree of precision that discrete sonar frames alone cannot provide. A key operational advantage of this system is its temporal analytical capability; multiple mosaics captured across successive survey campaigns can be stacked and compared, enabling rigorous change detection and long-term condition monitoring of subsea assets and environments. Further enhancing its utility, the mosaicked data can be vectorised to extract discrete features of interest, significantly improving interoperability across GIS, engineering, and asset management software platforms and facilitating seamless integration with the broader workflows of hydrographic, civil, and subsea engineering disciplines.
-
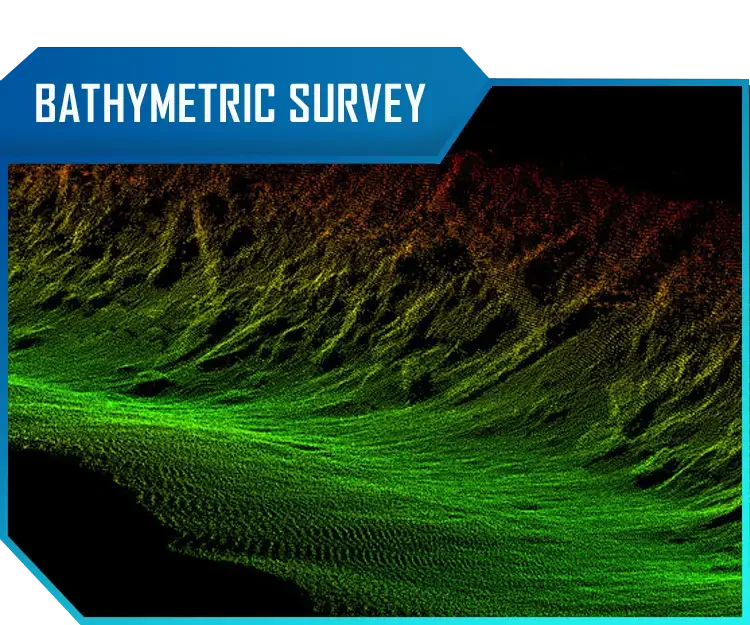
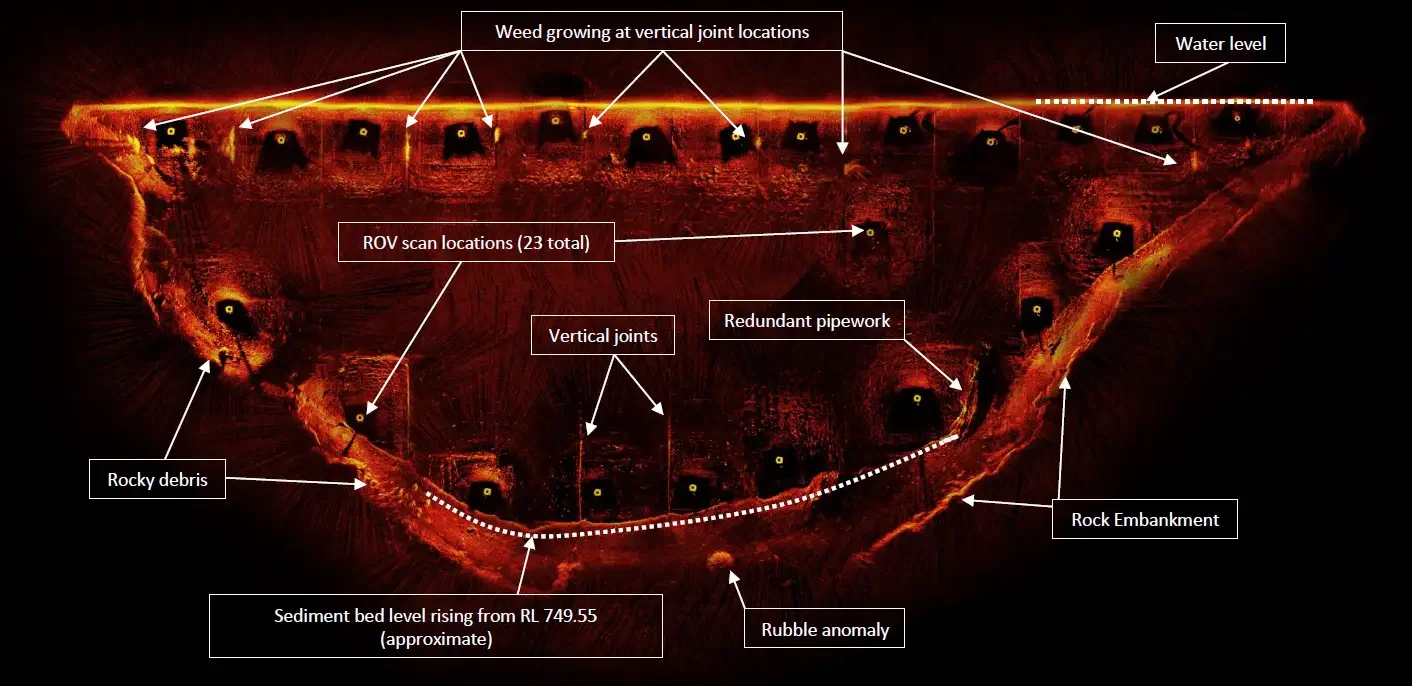
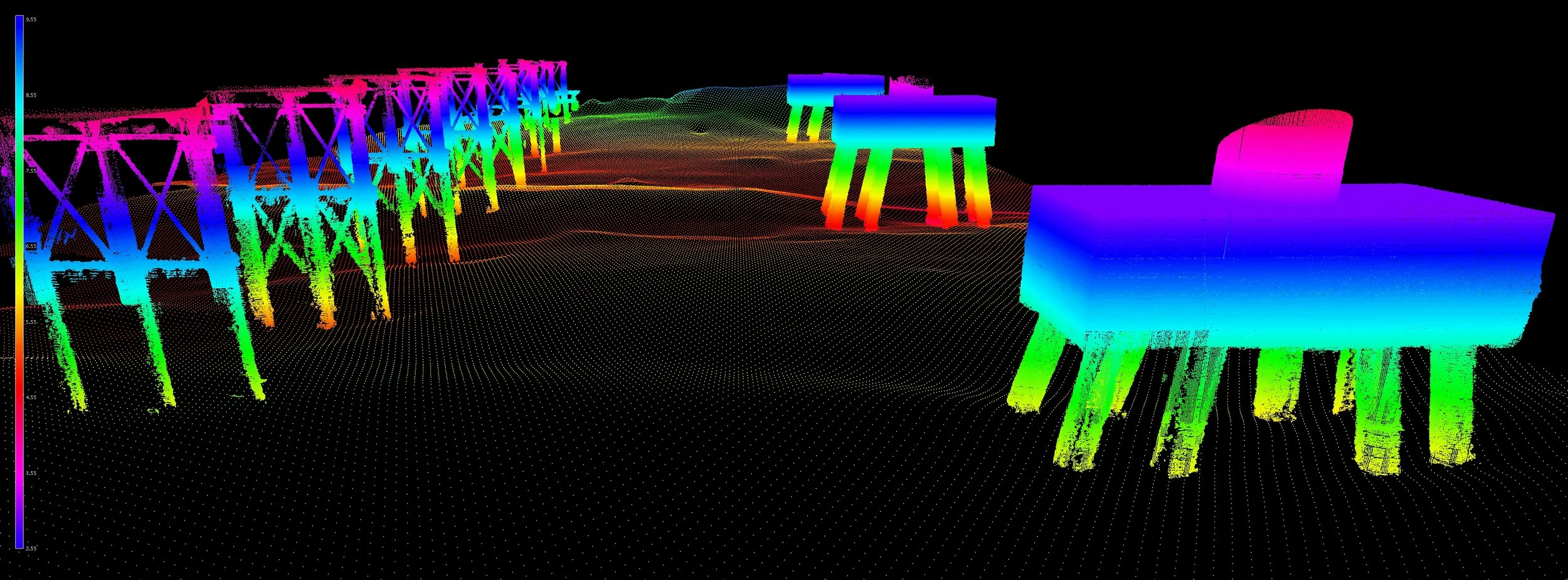
THREE-DIMENSIONAL MULTIBEAM SONAR BATHYMETRIC SURVEY
Bathymetry is the systematic measurement and mapping of underwater topography, providing the subsea equivalent of terrestrial elevation mapping and forming a foundational dataset for a wide range of marine engineering, environmental, and commercial applications. AUS-ROV employs the Norbit iWBMS multibeam sonar system to conduct high-resolution bathymetric surveys, an instrument renowned in the hydrographic industry for its exceptional swath coverage, angular resolution, and integrated water column profiling capability. Unlike single-beam systems that capture only a narrow depth profile directly beneath the vessel, multibeam technology simultaneously acquires hundreds of depth soundings across a wide swath, producing dense, georeferenced point clouds that render the seafloor in precise three-dimensional detail. This data underpins a broad spectrum of critical applications — from the identification of submerged hazards, seamounts, and reef structures for safe navigation and maritime charting, to the engineering assessment of subsea cable routes, offshore oil and gas infrastructure, and seabed pipeline corridors. Bathymetric surveys are equally integral to search and recovery operations involving missing vessels, aircraft, or man-made objects on the seafloor, where accurate terrain modelling can significantly reduce search area and operational cost. Australia's commercial fishing industry further relies on bathymetric data to identify productive deep-water habitats and target species-specific bottom conditions. The survey of a rockwall embankment presented in the image above was acquired by AUS-ROV using the Norbit iWBMS, illustrating the resolution and spatial fidelity that modern multibeam technology delivers.
-
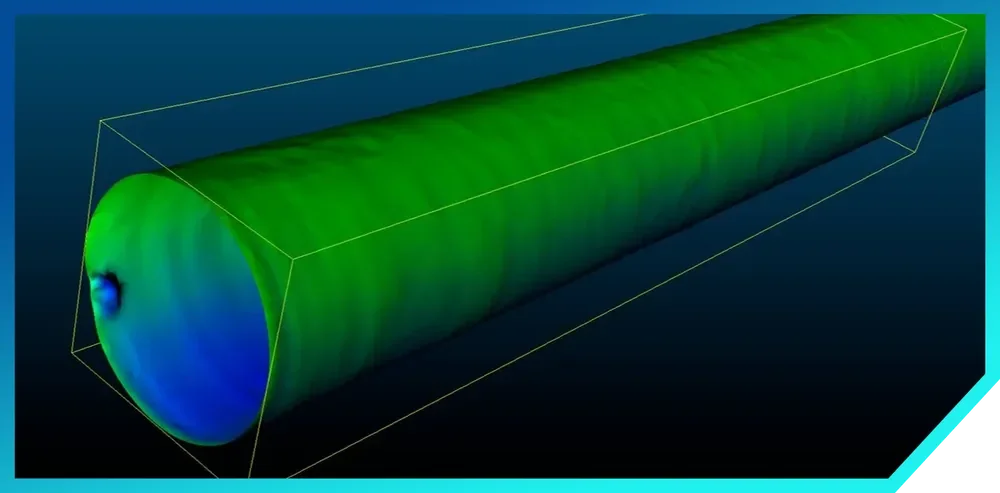
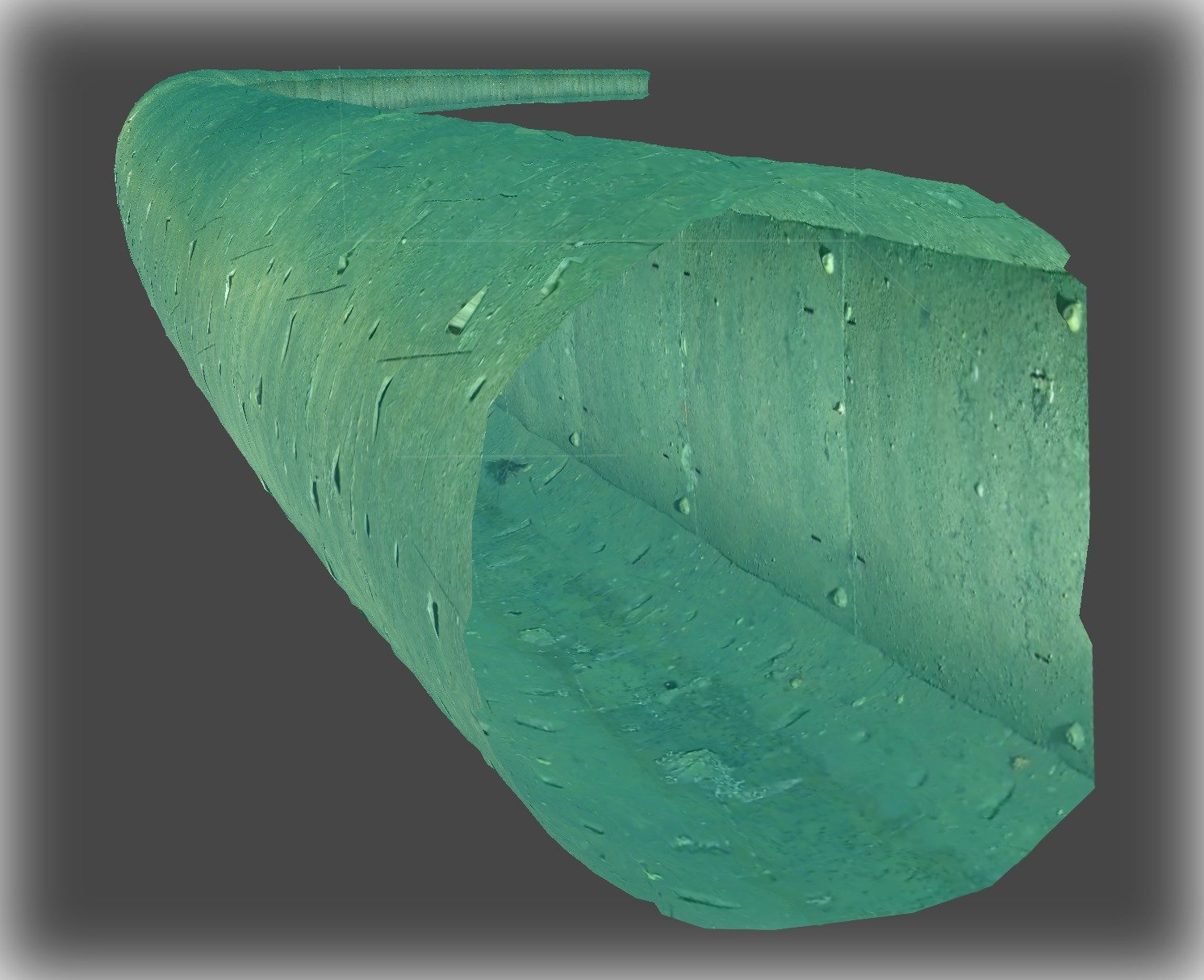
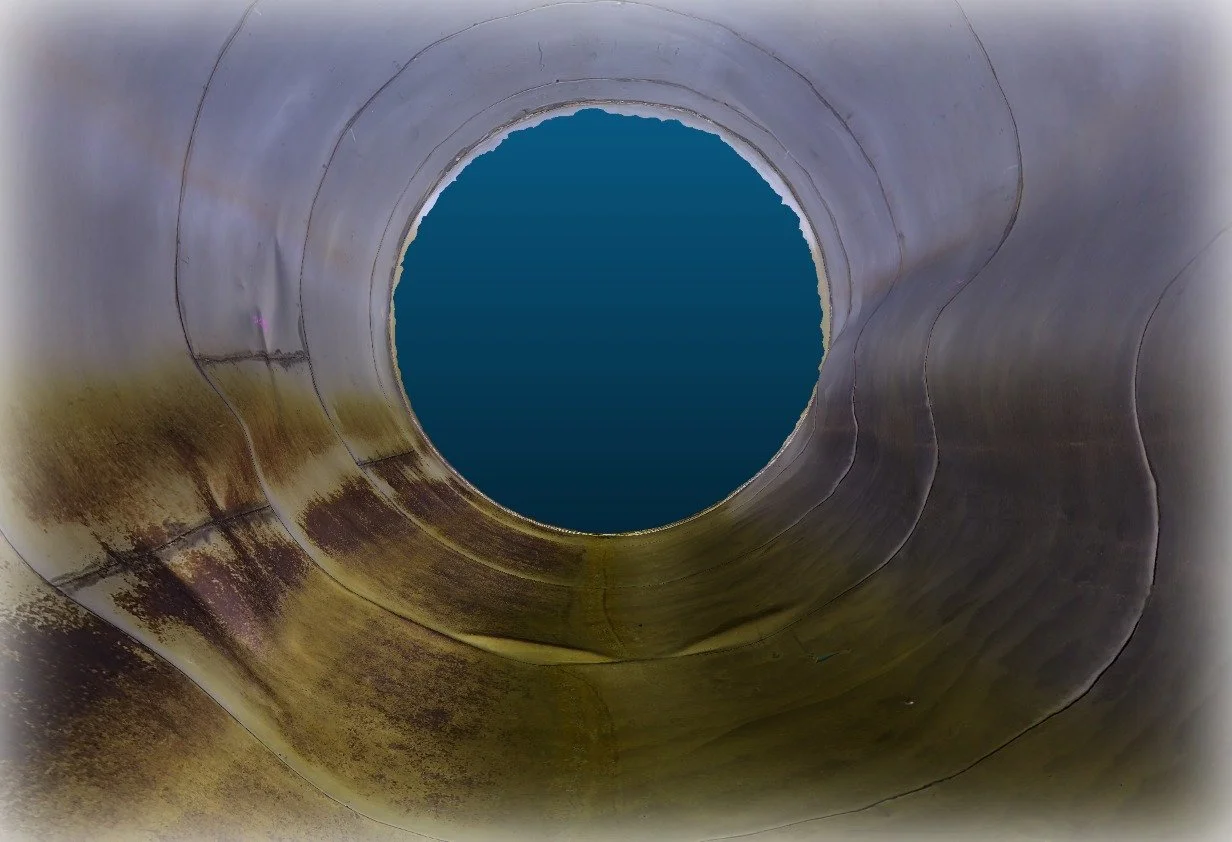
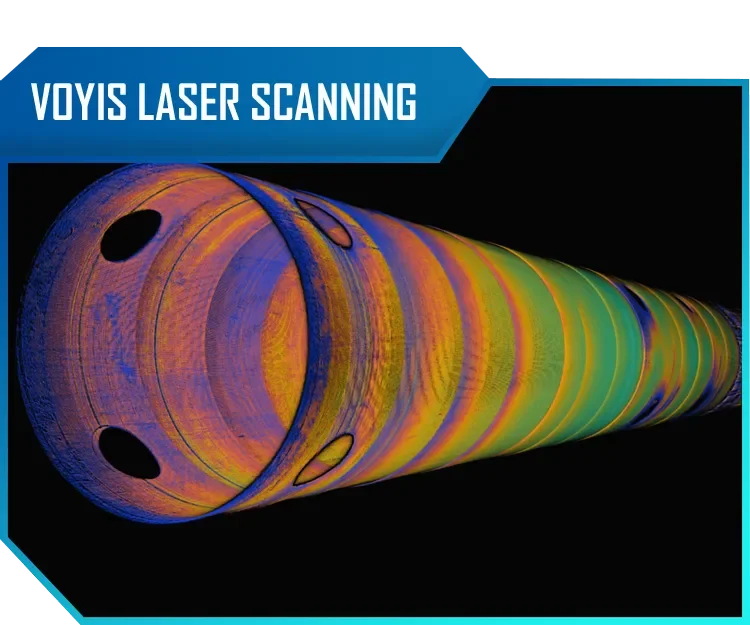
THREE-DIMENSIONAL TUNNEL AND PIPELINE PROFILING SONAR
AUS-ROV has developed a proprietary system for high-resolution 3D modelling of the internal geometry of pipelines, tunnels, and subsea conduits, purpose-built to meet the demanding inspection requirements of industries where structural integrity is critical. At the core of this capability is the integration of mechanical scanning sonar directly into our ROV platform — a technology that emits acoustic pulses across a 360-degree rotational sweep to capture precise distance measurements at defined angular increments, generating dense point-cloud data that is then processed into accurate, dimensionally reliable 3D models. Unlike optical inspection methods that are rendered entirely ineffective by turbid or zero-visibility water conditions, mechanical scanning sonar operates independently of water clarity, making it the definitive solution for confined, submerged environments where visual assessment is not possible. This system has been deployed across a broad spectrum of critical infrastructure sectors, including water and wastewater conveyance systems, oil and gas transmission pipelines, mine dewatering tunnels and adits, and marine outfall structures. The resulting 3D models provide engineers and asset owners with quantifiable data on bore profile, deformation, ovality, sedimentation accumulation, and structural anomalies — enabling condition assessment, remaining-life analysis, and rehabilitation planning to be conducted with a level of confidence and spatial accuracy that traditional inspection techniques simply cannot achieve.

Precision Underwater Laser Scanning & 3D Subsea Modelling
AUS-ROV | 2G Robotics ULS-200 | Voyis Insight Nano
AUS-ROV delivers industry-leading underwater laser scanning and high-resolution subsea 3D modelling services using advanced systems including the 2G Robotics ULS-200 Underwater Laser Scanner and the Voyis Insight Nano Laser Profiler.
These technologies enable the capture of high-accuracy subsea point cloud data, producing engineering-grade digital models of submerged infrastructure and assets with exceptional geometric fidelity.


Underwater Laser Scanning & Subsea 3D Digital Modelling
Engineering-Grade BIM & CAD Deliverables | AUS-ROV
Underwater laser scanning enables the creation of highly detailed 3D digital models of submerged infrastructure, revealing fine-scale geometric features that cannot be resolved using conventional acoustic or visual survey technologies alone.
By capturing dense, high-accuracy point cloud datasets, underwater laser systems allow asset owners and engineers to virtually interact with submerged structures with a level of precision and dimensional certainty previously unachievable in subsea environments.

AUS-ROV UNDERWATER LASER SCANNING CAPABILITIES
AUS-ROV operates two underwater laser scanning systems to suit a wide range of project requirements. Our Voyis Insight Nano delivers compact, short- to medium-range scanning with sub-millimetre resolution, making it ideal for pipeline inspection, confined space surveys, corrosion detection, and detailed structural assessments. Complementing this, our legacy ULS-200 from 2G Robotics — now Voyis — provides a proven medium-range dynamic scanning solution with a strong track record across subsea asset surveys.
Together, these systems allow us to tailor our approach to your specific project needs, whether that involves detailed close-range inspection or broader dynamic survey work. Please give us a call to discuss your requirements, and we can determine which system, or combination of both, will provide the highest achievable certainty in your BIM or CAD models.


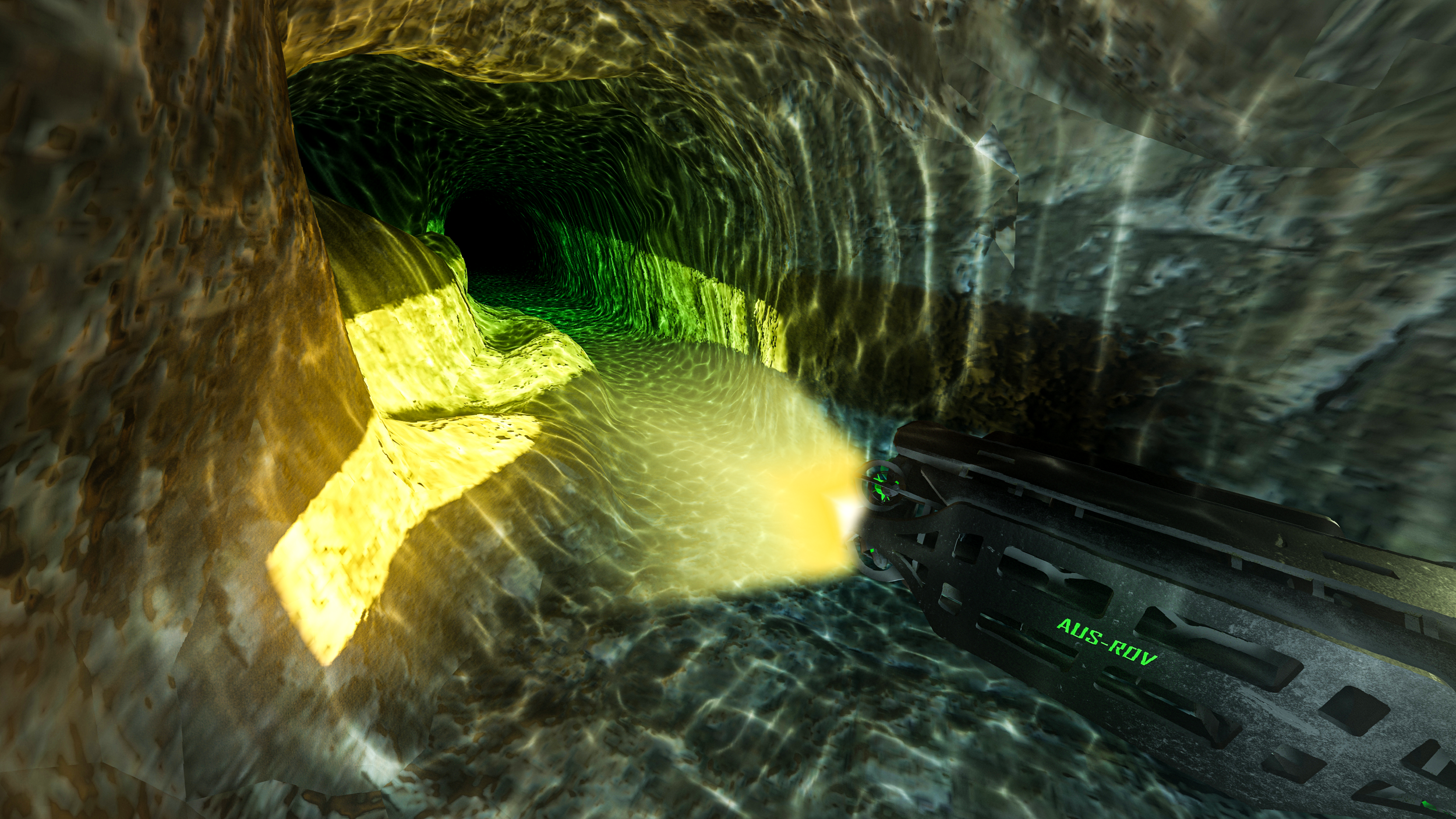
Underwater Photogrammetry | ROV Stereo Camera Survey & 3D Subsea Modelling
Underwater photogrammetry is the process of capturing overlapping imagery from calibrated camera systems mounted on remotely operated vehicles to reconstruct precise, georeferenced 3D models of submerged structures, infrastructure, and environments. Unlike single-frame inspection video, stereo photogrammetry uses two or more synchronised cameras with a fixed, known baseline separation to triangulate depth at every corresponding pixel, producing dense point clouds and high-fidelity textured meshes that can be measured, annotated, and integrated directly into engineering and asset management workflows.
3D photogrammetric flythrough of a desalination plant intake tunnel. AUS-ROV deployed an ROV equipped with high-resolution cameras to capture overlapping stereo imagery throughout the tunnel interior, which was then processed into this georeferenced 3D photogrammetric model for condition assessment and dimensional analysis.
AUS-ROV remotely operated vehicles can be equipped with precision stereo camera systems specifically configured for underwater photogrammetric survey. Each stereo rig comprises two high-resolution cameras mounted at a fixed baseline, pre-calibrated in a controlled environment so that intrinsic and extrinsic parameters are known before the vehicle enters the water. During a survey, the ROV flies a planned lawnmower or orbital pattern over the target structure while the stereo pair captures synchronised, overlapping image sets at consistent intervals. Onboard lighting arrays and laser scalers provide uniform illumination and real-time scale reference, while integrated navigation sensors stamp every frame with accurate positional metadata. Post-processing software then uses stereo triangulation and structure-from-motion algorithms to generate dense, georeferenced 3D point clouds, textured meshes, and orthomosaic maps that engineers can interrogate for dimensional measurement, defect quantification, and change detection over time.
ROV-deployed stereo photogrammetry delivers measurable, repeatable 3D datasets across a wide range of underwater inspection and survey scenarios. In the offshore energy sector, stereo photogrammetric models enable structural integrity assessments of wind turbine foundations, jacket structures, pipelines, and subsea manifolds, capturing millimetre-level detail on corrosion, marine growth thickness, weld profiles, and mechanical damage without the need for divers. For dam and water infrastructure operators, photogrammetric surveys of spillways, intake tunnels, penstock linings, and concrete aprons provide engineers with dimensionally accurate as-built records that support condition grading and maintenance planning. In ports and maritime civil engineering, 3D models of wharf piles, sheet piling, seawalls, and breakwaters reveal scour, spalling, and bio-fouling patterns that inform repair scheduling. Environmental and scientific applications include coral reef health monitoring, habitat mapping, archaeological site documentation, and aquaculture infrastructure assessment. Because every point in the model carries real-world coordinates, successive surveys can be compared to detect and quantify structural change over months or years, transforming reactive inspection programmes into data-driven predictive asset management strategies.